


 English
English français
français русский
русский español
español português
português العربية
العربية Türkçe
Türkçe ไทย
ไทย Tiếng việt
Tiếng việt chinese
chinese
This problem can be done through the system settings. First if the pipe is long enough. It can be solved by setting the E value of the interference avoidance distance in Figure 1 through system operation.
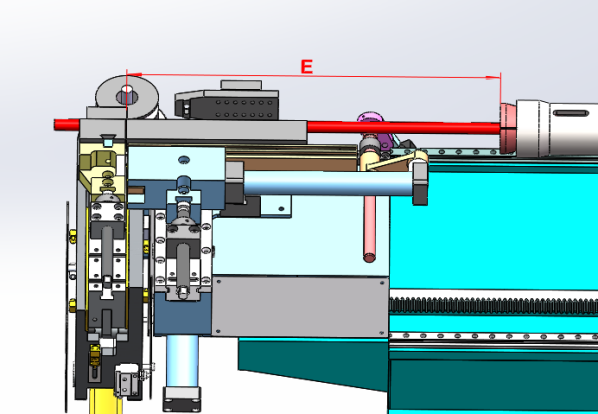
Figure 1 Interference Avoidance Length
This value can be entered by measuring the guided mode length and inputting data larger than this value. First, the system will calculate a reasonable clamping distance and then when the feeding car reaches the set distance, the system will stop the car. This avoids collision interference. Another way is to stop the action through the induction switch. As shown in Figure 2 is the sensor switch

Figure 2 Sensor switch
When the feeding car touches the sensor switch, the system will stop its movement.
If the pipe is short and there is not much distance for the feeding car to go back. You need to set the clamping sequence in the system. it can be set to the sequence of feeding - clamping die clamping - trolley retracting - guide die clamping - pipe bending.




